RoboMagellan
Purpose and Goals
I really wasn't interested in finding pylons, but I wanted a robot that could navigate around outdoors, perhaps drive down the sidewalk or around the block. So all early work was done on a flexible platform that could function outdoors and incorporate a variety of sensors. Flexibility was important since I had no experience with existing sensors. Work with sensors in the past indicated that each new sensor would require time and testing to determine its true value and limitations. Locating pylons was added late in the project, almost as an afterthought. The first two contests (Spring and Fall, 2008), this robot did not find anything useful and had a lot of problems with autonomous control. The robot won the next two contests (Chibots RoboMagellan 2009 and 2010) finding all three pylons consistently. |
Chassis
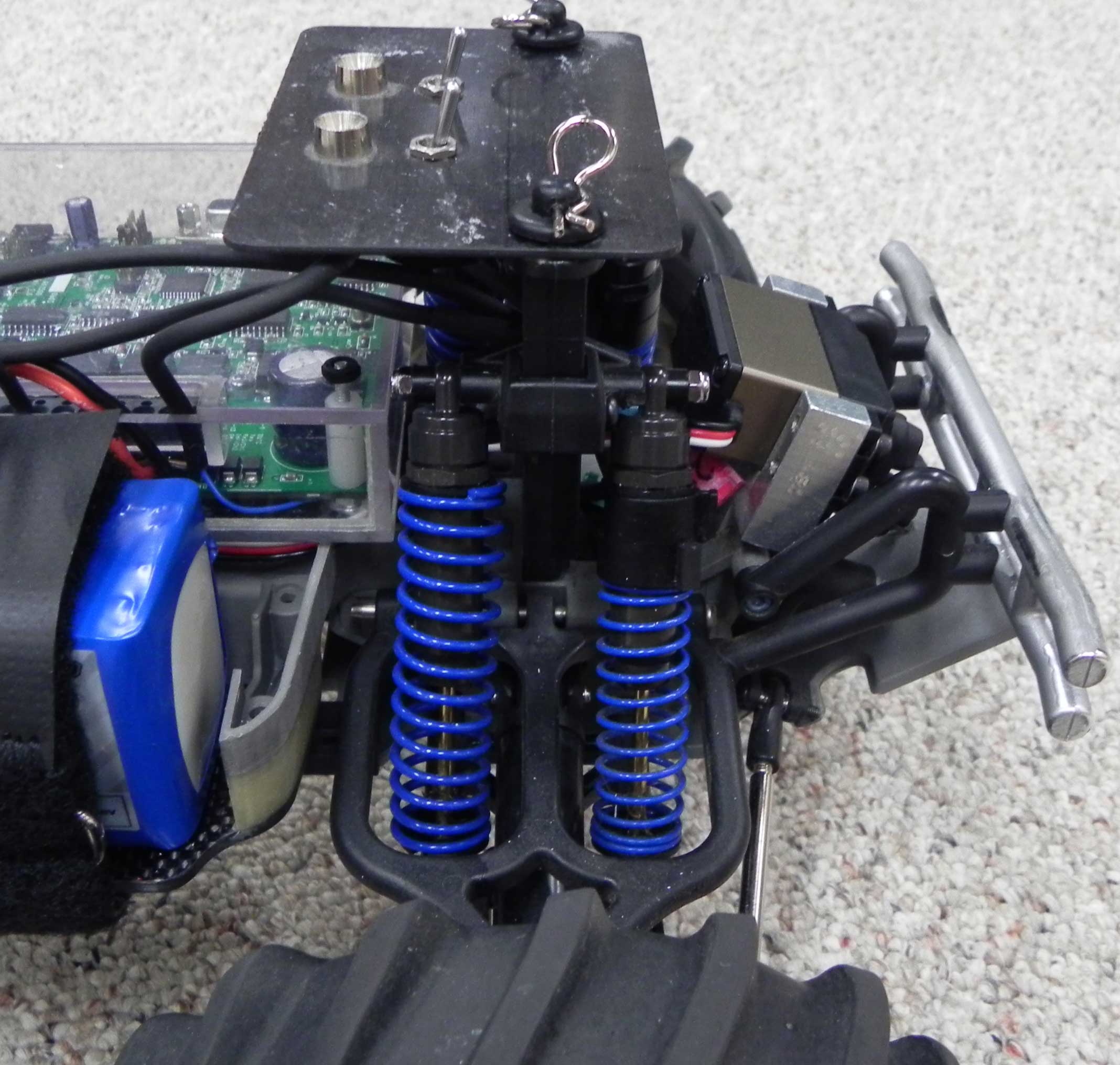
Initial running indicated that the stock springs were not capable of handling the added weight, so a local hobby shop provided the heaviest springs they could find. Additional spring spacers were added to level the chassis. That crude setup proved reasonable for early development. Late in 2010 a serious attempt was made to stabilize the chassis of the robot. The chassis bounced around quite a bit leading to false hits from the sonar sensors. The increased weight of the robot appeared to be the primary problem. A set of Traxxas Big Bore Shocks was purchased, along with Heavy Duty Blue Springs from VG Racing. The Springs are .075" diameter compared to .062" for the Blue springs that have been used and .045" for the original Traxxas Red springs.
The current weight of the robot is 13.75 pounds. |
Radio Control The next function was the development of gradual acceleration and deceleration performance. The Propeller limited the rate of change of speed in order to reduce tire slip on grassy surfaces. The point of this was to increase the accuracy of the encoder. In order to avoid obstacles, braking had to be far more aggressive than acceleration. Stability of the robot was a primary concern. The E-Maxx can easily be flipped or rolled if too much steering is applied at too high a speed. In order to create stability, the Propeller did some processing of the incoming R/C signal before sending commands to the servos. First, maximum speed became a variable that was reduce as steering increased. Second, the actual speed was monitored with the encoder and actual steering output was limited based on that speed. There was some trial and error work here, but the end result was a robot that could not be flipped or rolled on reasonable surfaces and still respond very quickly to avoid impending obstacles. The radio control continues to be an option. The receiver can be plugged into the control board at any time and there is a Propeller cog waiting to process a good signal from the receiver. The Propeller will recognize a good R/C signal if five good frames are received in a row where each channel and the frame timing is within acceptable limits. The radio control function has been used extensively in both sonar experiments and chassis tuning. |
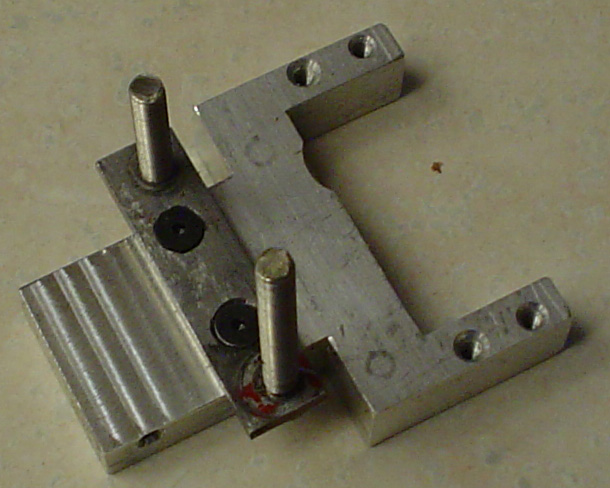
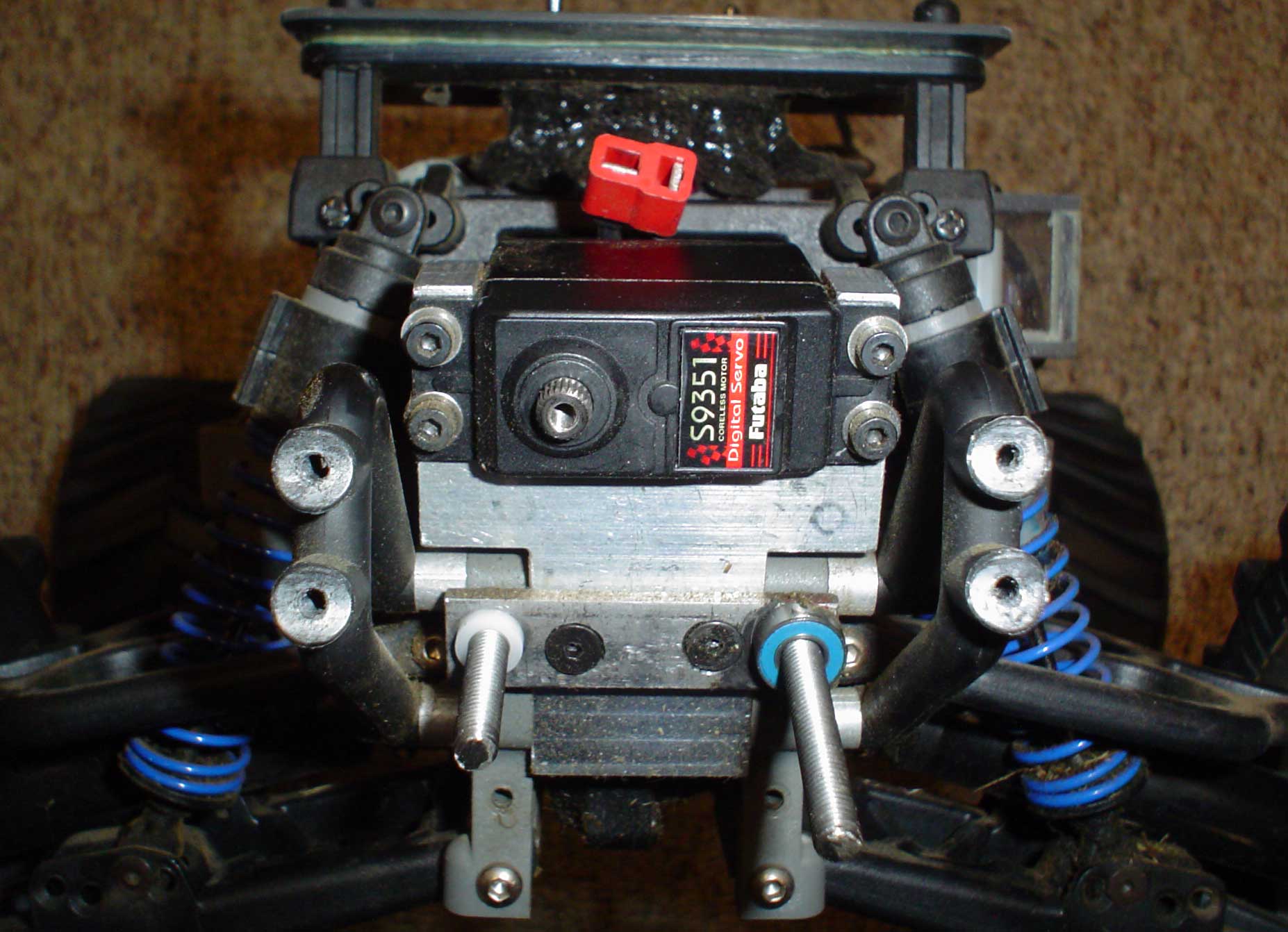
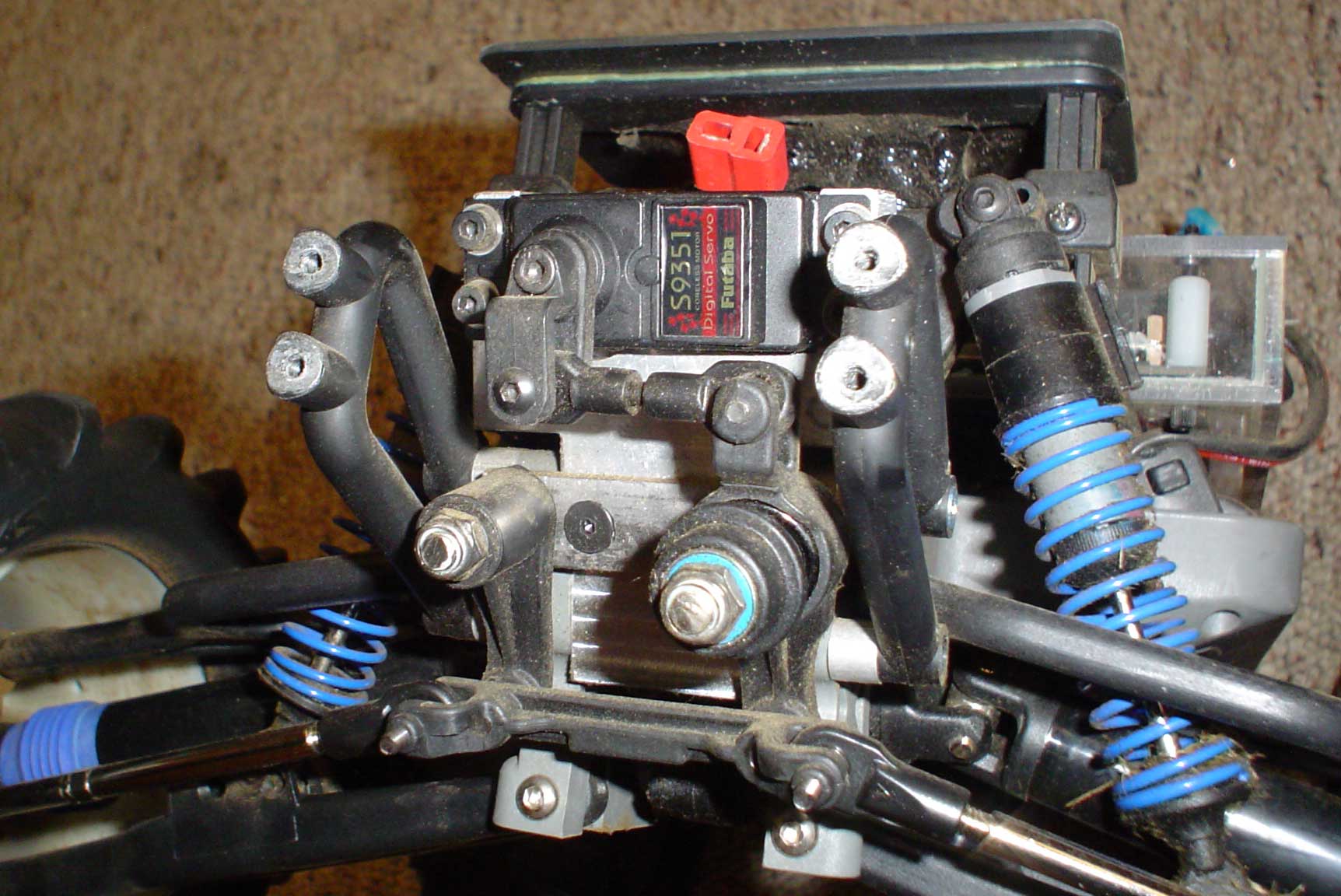
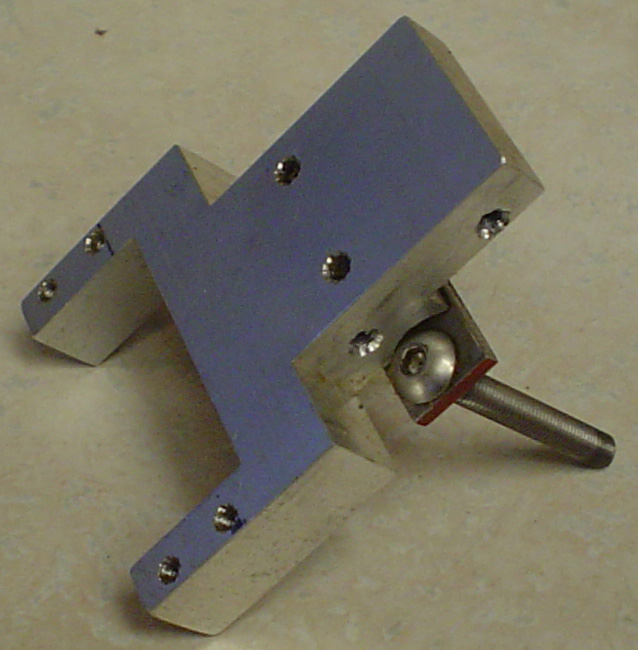
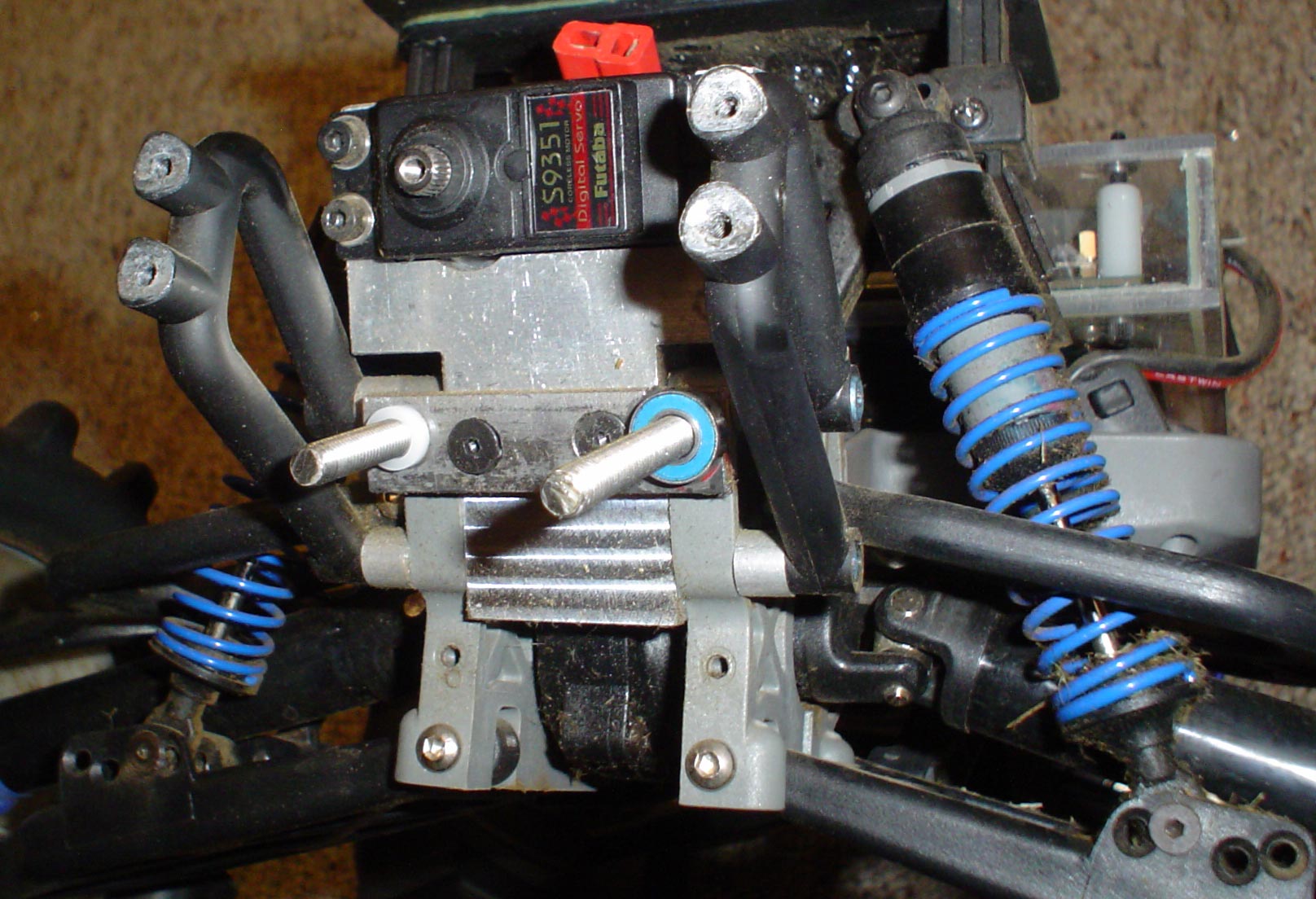
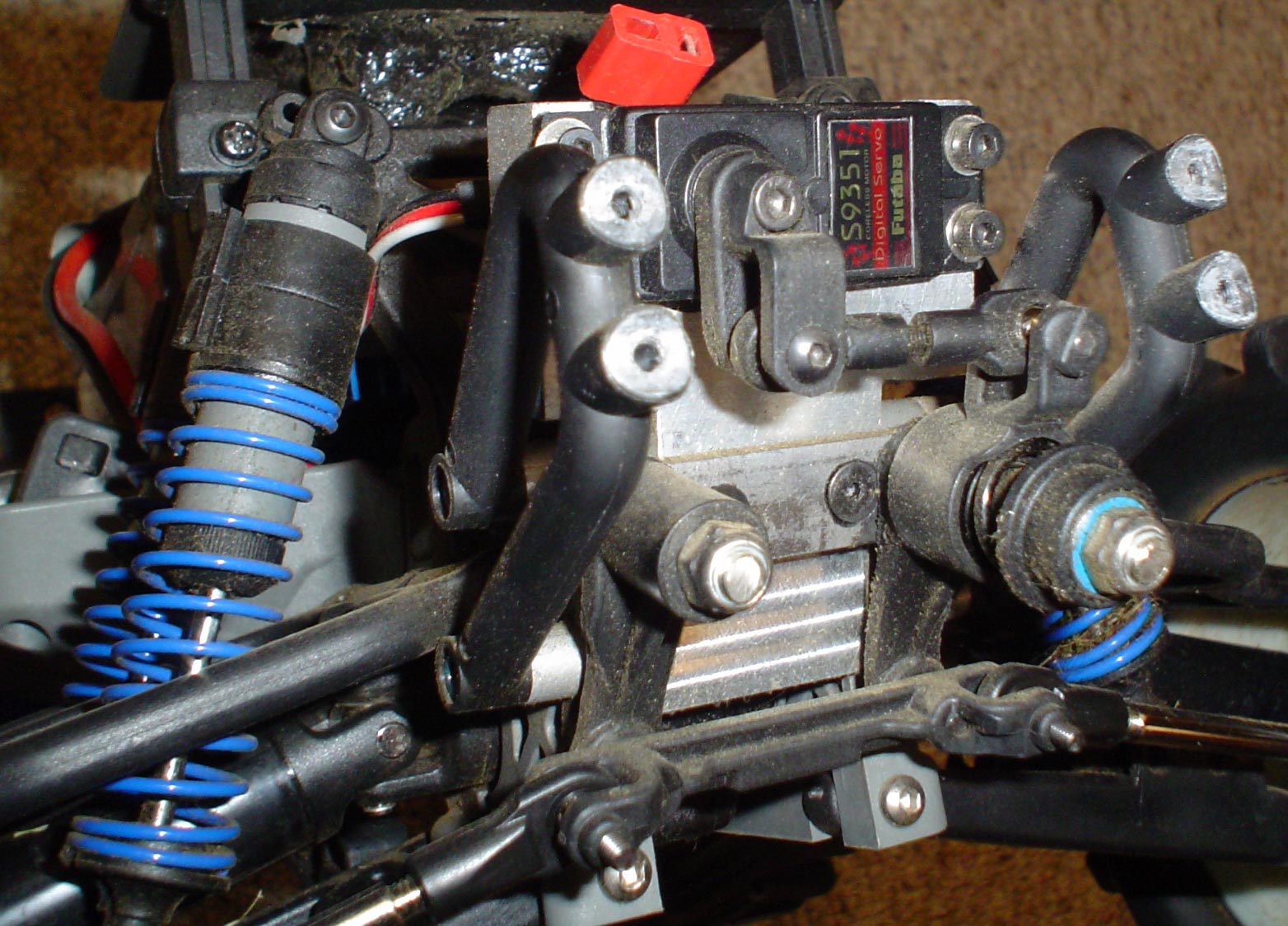
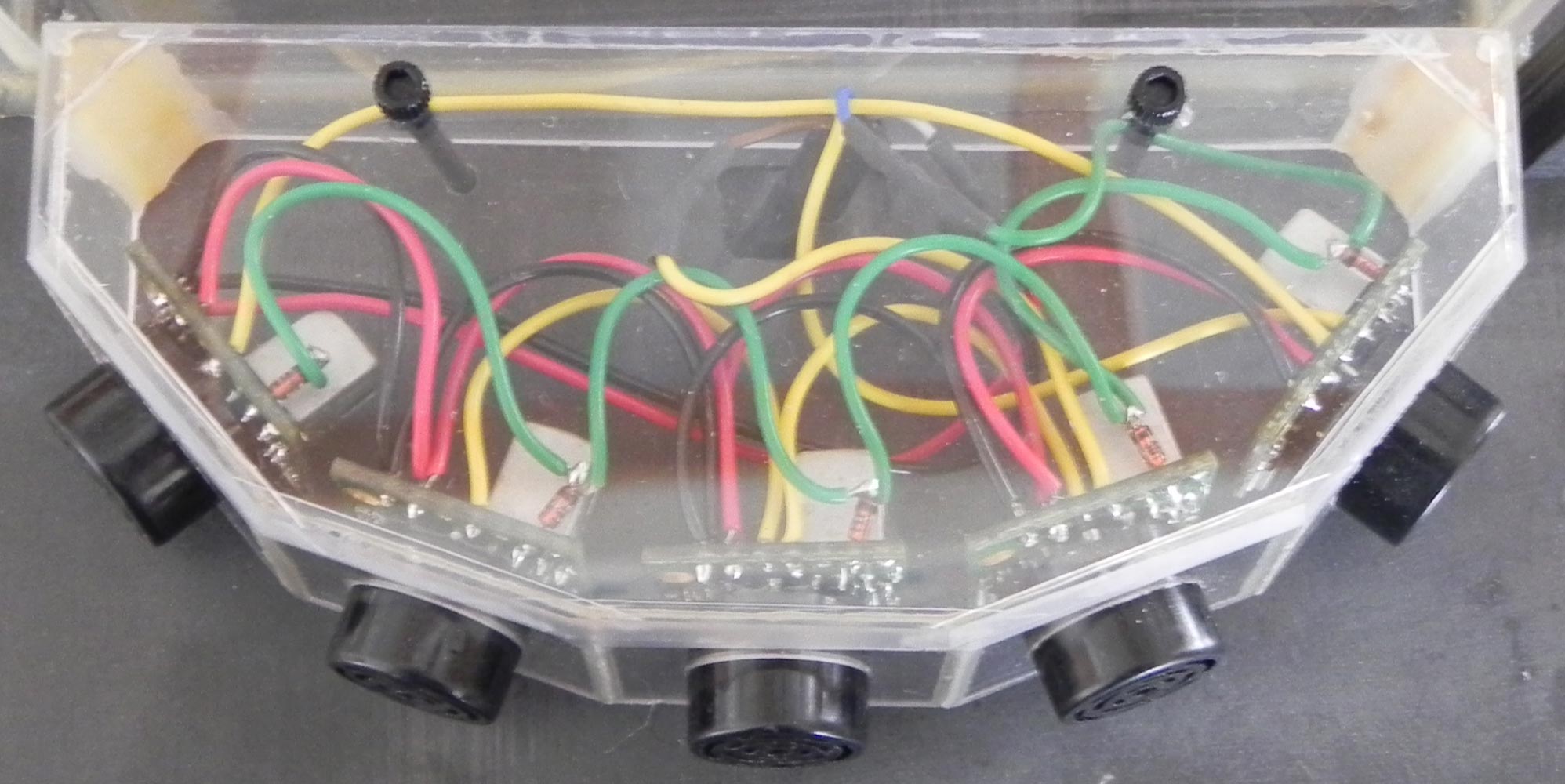
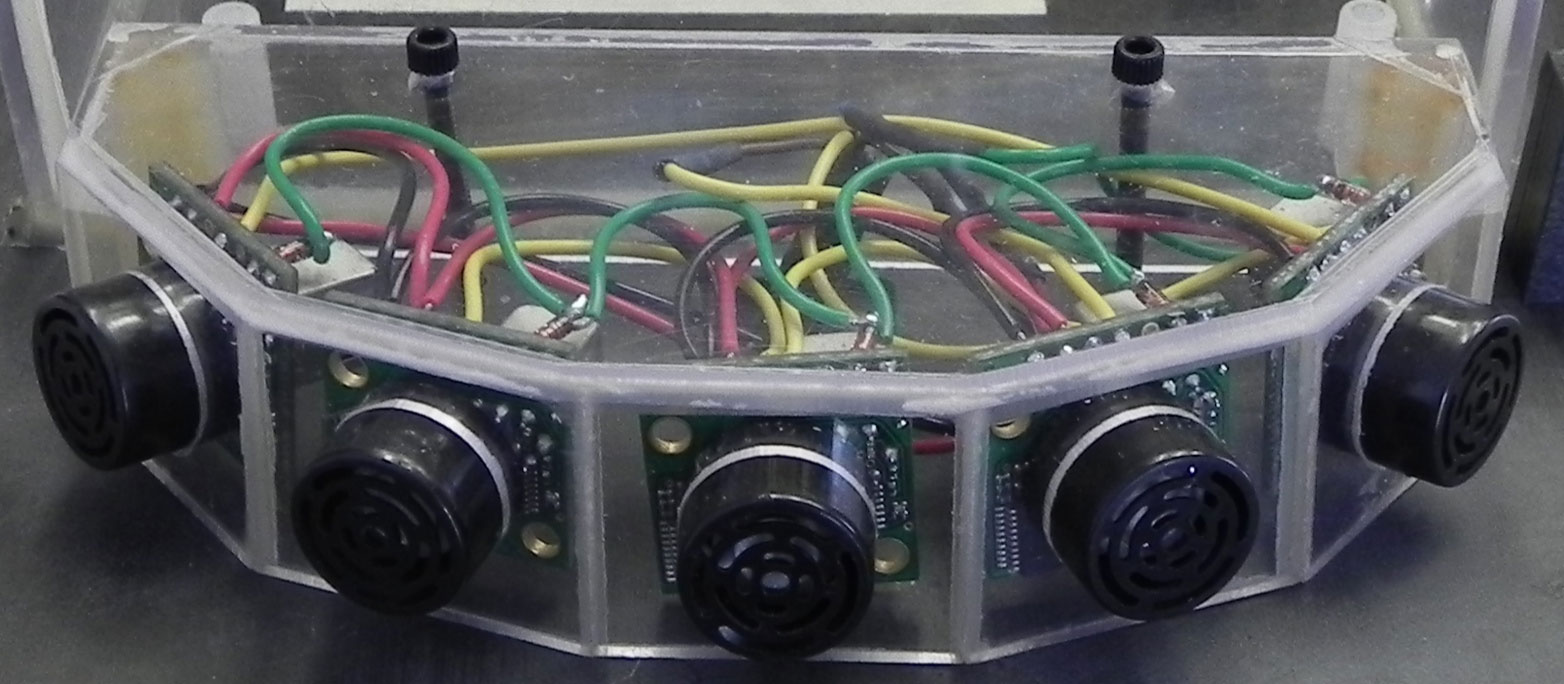
Rear Steer The below photos should give some idea of the rear steer design. Standard E-Maxx steering servo saver was used along with front end tie rods. The bumper mounting brackets had to be moved outward 0.25" to increase clearance for the steering mechanism.
At low speeds the front steering provides 100% of the steering movement for the first 75% of the control range. The last 25% of the control range is done entirely with the rear steering, going form 0% steering movement to 100% steering movement. At speeds over 2 or 3 mph, original performance is enabled, i.e. all of the steering is done with the front steer and the rear steering is locked straight ahead. After the modifications the turning circuit is now a more reasonable 60". |
Motor Even with the reduced gear ratio, the speed was too high and had to be limited with the microcontroller. Also, low speed performance on hills in thick grass was a problem, so a lower gear ratio was needed. To that end, a two speed transmission was added with the low speed gear permanently engaged. At the same time, the pinion was changed to 13 tooth. Finally, speed and torque were in a reasonable range.
|
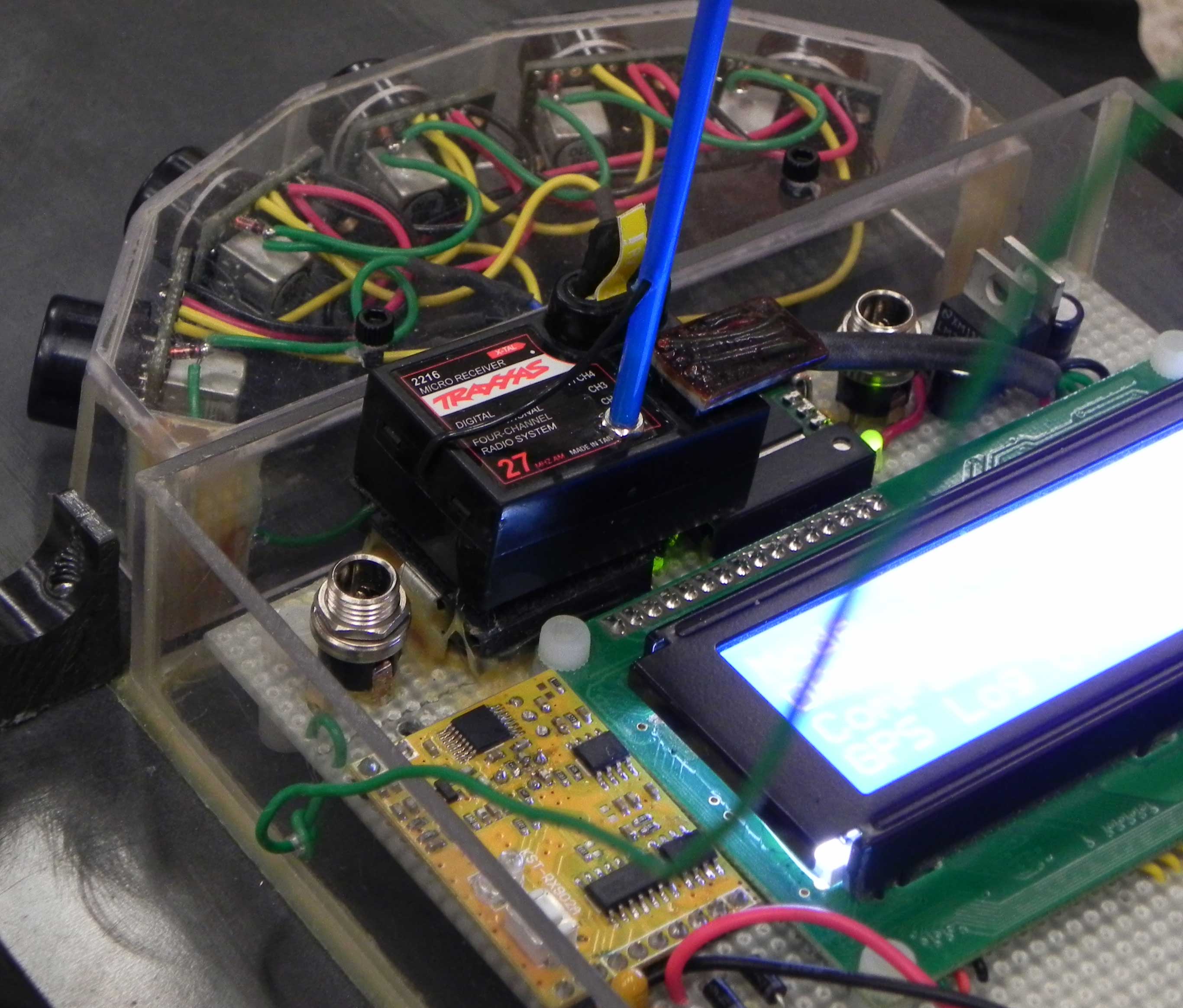
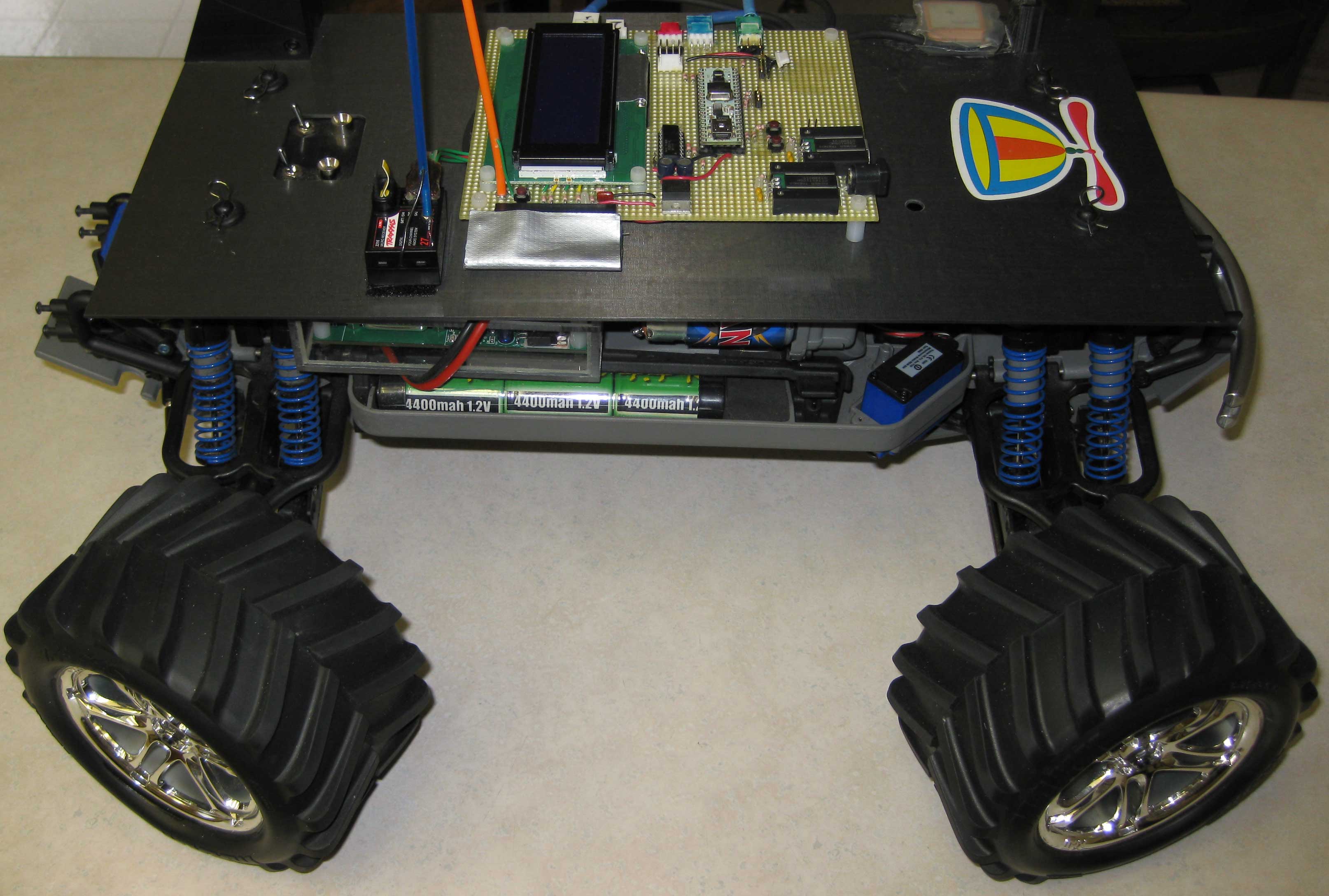
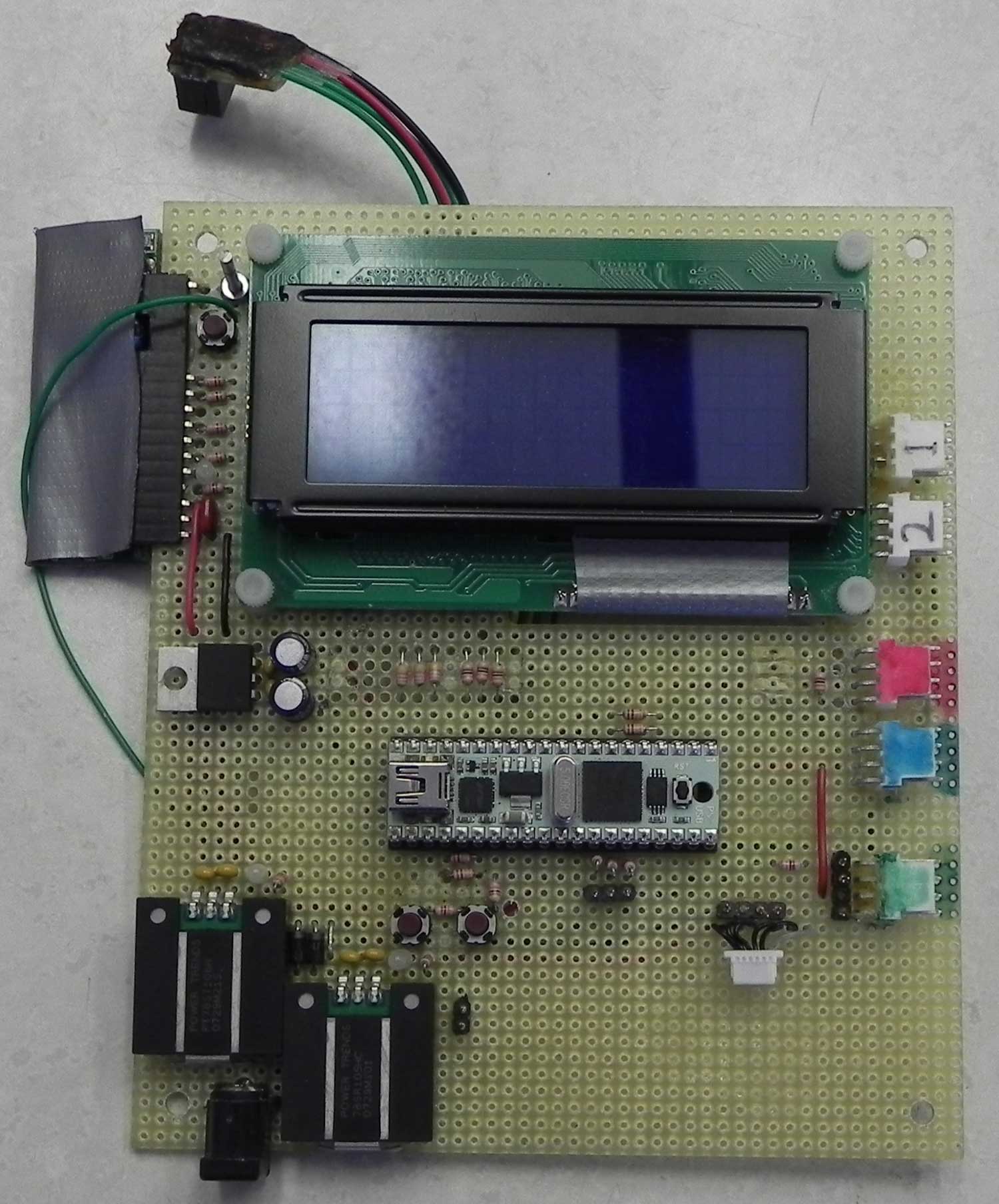
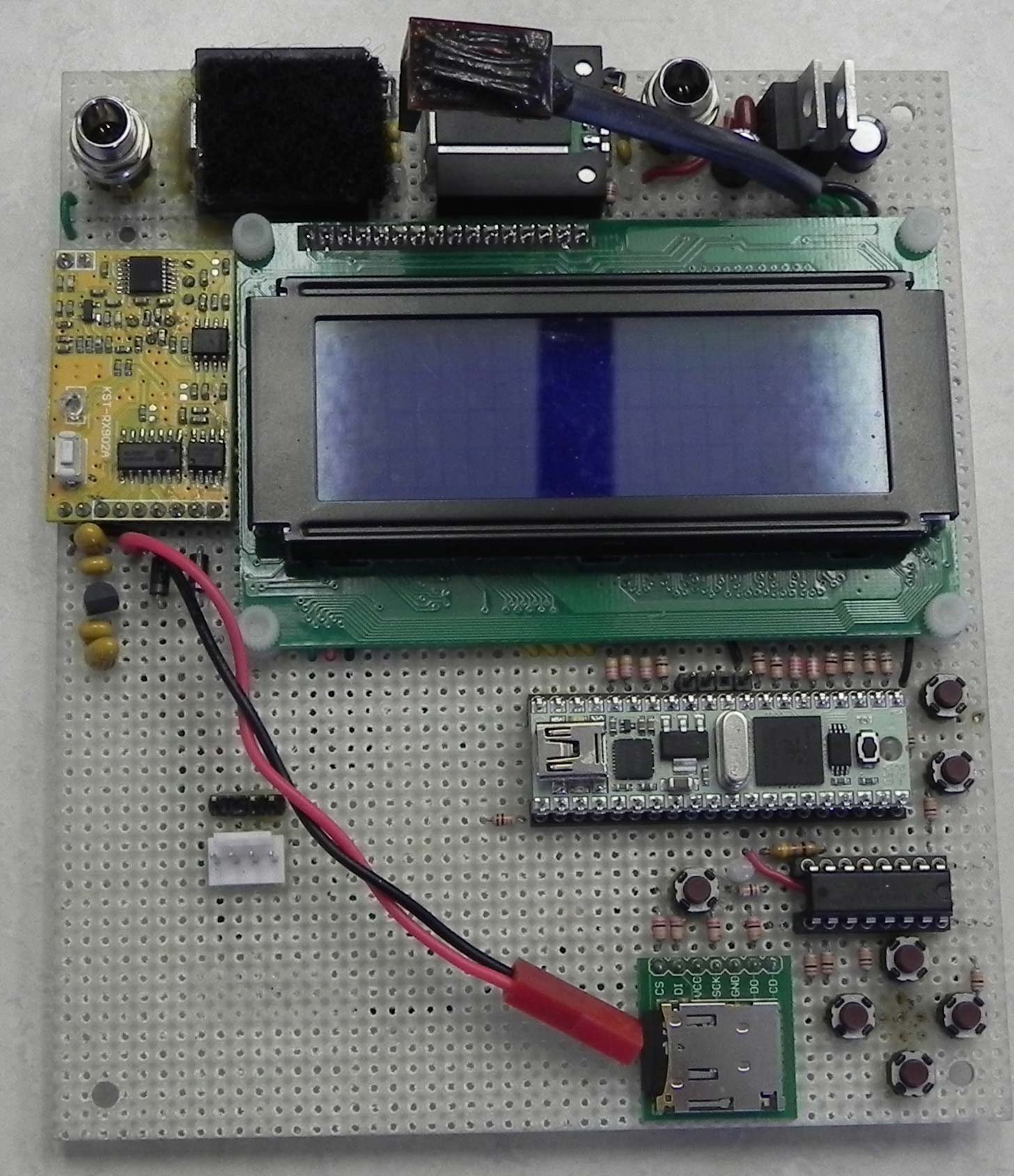
Electronics The display is a 4x20 character LCD from Comfile Technology Inc. The back light allows the display to be easily read in direct sunlight. The advantage to this LCD is the serial interface rate of 115,200 baud that allows for very fast updates. Actually, even more speed was required, so only one line of display is updated during each control loop. In the Fall of 2008, there was a problem with the LCD in outdoor testing. Apparently, the resonator was cold sensitive. The manufacture was very helpful identifying the problem and providing replacements. Now, each new or revised board is run for an hour or two in the freezer to assure cold weather performance. The board contains three voltage regulators, a switching 6 volt (PT78ST106H) for the servos, a switching 5 volt (78SR105HC) for some electronics, and a linear 3.3 volt (LM2937ET-3.3) for the rest of the electronics. Soon, it was discovered that the sonar units do not work well on a switching power supply, so a linear 5 volt (LM2940CT-5.0) regulator was added. Later, it was found that the the GPS performs better if it remains powered on all the time. A small Lipo battery was added along with a linear 3.3 volt regulator to power the GPS for up to 24 hours. Work is continuing in this area. On the initial board, the remote kill switch was the same unit that is used on my fast sumo robots. For the revised board, a new version of the rolling code remote was used. An I2C IO expander (PCF8574AN) was added to provide access to more push buttons and I wanted to play with one because there was new code posted in the Propeller Object Exchange. It controls seven push buttons and one LED. There is also posted Propeller code that takes GPS data and creates a Google Earth .kml file on an uSD card. So, a uSD socket was added. The uSD code does take up a cog, so there is the possibility of replacing it with another logging device that requires less Propeller resources. All electromechanical devices were wired through optical isolators. This was found to be unnecessary and all Propeller interfaces are now just resistors. A 2.2K ohm resistor is used on Propeller outputs and a 10K ohm resistor is used on Propeller inputs. |
Encoder The encoder delivers 120 cycles per revolution or 480 quadrature changes per revolution. Mounted on the robot, the encoder produces 3,286 counts per decimeter robot movement. Although this seems excessive, rollover with a 32 bit microcontroller isn't a problem. The robot would have to travel about 85 miles before the encoder counter would reach maximum value. A standard encoder function in the Propeller was used to produce distance traveled and rate of travel (speed). At the second RoboMagellan contest in Chicago, the encoder stopped working. Apparently, there was too much axial movement in the encoder. The problem was rectified by replacing the stock bushings in the old motor case with ball bearings, and using precision spacers to control sensor wheel to encoder distance. |
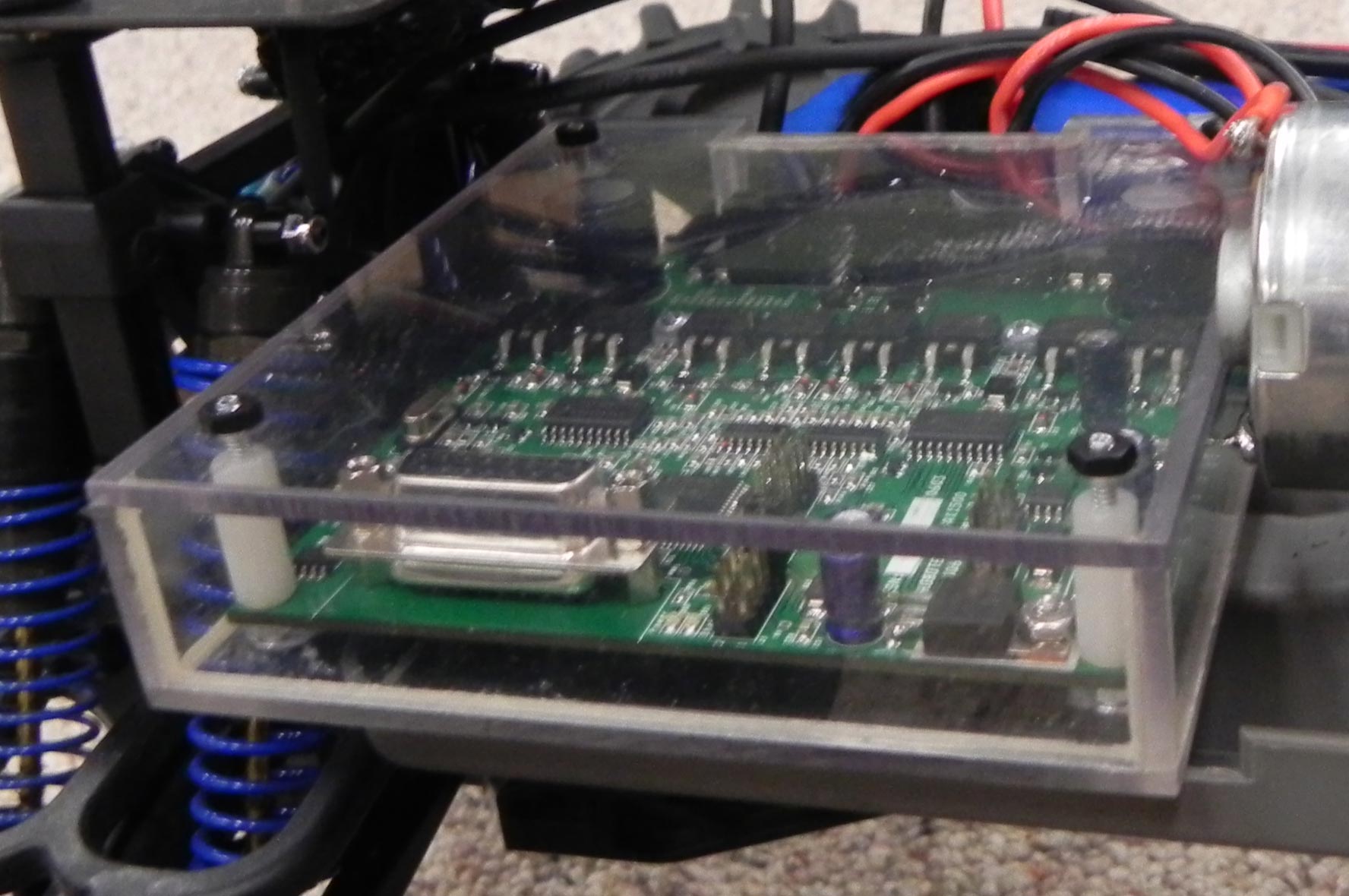
Speed Control Based on excellent experience with AX2500 and AX2550, a RoboteQ AX500 was tried. Unfortunately, the AX500 also allowed coasting during speed changes. Apparently, it is the only RoboteQ product that does.
Satisfied with the AX1500, a polycarbonate housing was built to provide a little protection from moisture. |
Compass Unfortunately, when transversing uneven ground, the sideways accelerations of the compass produced major heading changes. Lowering the compass in the chassis and playing with the filter parameters helped, but a straight course could not be obtained. Finally, a Honeywell HMC6352 was used. At last there was reasonable directional control. This is not a tilt compensated compass. One big advantage is that there is an operating mode called the “Query Mode” that is very fast and allows compass updates every 20 msec. It should be noted that there are many magnetic hazards at the Chibots RoboMagellan site. The present mast height of 22 inches is not sufficient to avoid the hazard. Every run shows some unusual behavior caused by compass errors. |
Servos The original Traxxas 2056 servos were replaced with Traxxas 2075 digital servos (Ebay) so that the pulse rate could be varied between 20 msec and 40 msec without impacting servo performance. For the rear steer, a Futaba S9351 digital servo was chosen for its high torque and compatibility with the Traxxas servo horns. All of the servos are run off of the 6 volt regulator without any problems. |
Sonar The Propeller counts the pulse width using a factor that results in the final count being the distance to the detected object in decimeters. If the pulse width is longer than 80 decimeters distance, the counting is terminated and the sequence is reinitiated. This is done to prevent locking the cog. The results of the sensors do not directly control the steering or speed of the robot. The results limit the maximum right or left turn and the maximum allowable speed. Using this technique, there is little interaction between the navigation functions and the obstacle avoidance functions. If the sonar detect an object less than three decimeters away, an escape sequence is initiated. The only control with a higher priority than the escape sequence is the kill switch. When in the escape sequence the robot performs a three point turn. Remember the three point turn from the Radio Control section above? The robot continues the three point turn until the sonar detects a clear path to continue other movements. Of course, the three point turn starts in the direction closest to the desired path.
Poor detection distance at speed is the major limiting factor in the robots performance. Work is continuing in this area. |
GPS The EB-85A was replaced with an EM-406A that seemed to work better. With either GPS it appears that performance is increased if the GPS unit is mounted on the carbon fiber chassis plate instead of the perforated circuit board. There is a forum post that indicates that the Propeller may adversely affect near GPS performance. For 2010, the EM-406A was replaced with the u-Blox 5 based GS407. The performance is slightly better than the the EM-406A, and it updates four times a second. The faster update rate helps when approaching way points and changing way points. Another advantage of the u-Blox 5 is it's support software. The casual user has much more control of the characteristics of the GPS output. I am currently looking at the Media Tek MT3329 which may prove to be better than the u-Blox. |
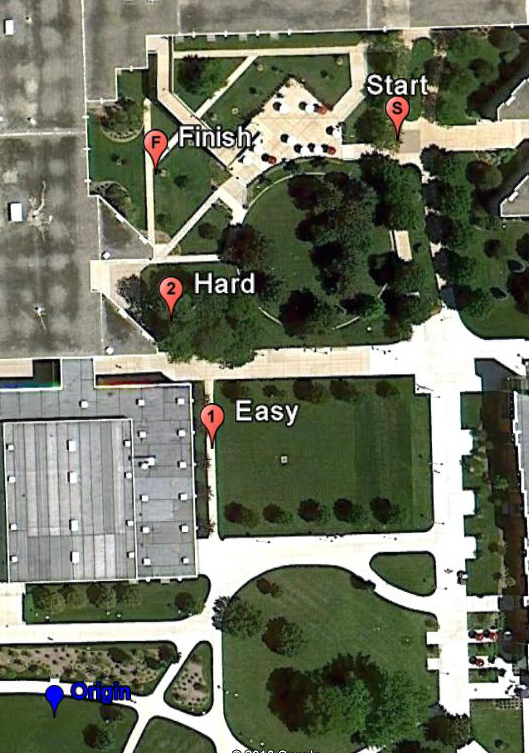
Latitude and Longitude For each new location, Google Earth is used to locate the artificial origin and an online program is used to calculate degrees per meter for Latitude and Longitude. During ASCII to integer conversion of the NEMA sentences, only the difference between the actual readings and the artificial origin are calculated and converted to decimeters. Decimeter GPS distances are unrealistic, but sonar and encoder decimeter readings are reasonable and having two different standards of measurement in the same program would be very confusing.
Calculations from GPS data was more difficult that originally anticipated. The distance from the present location to the way point is fairly straightforward since good square root functions exist. On the other hand, arc Tan function was much more difficult. Someone posted the original code which was very time consuming and not very accurate. My arc Tan function is now on it's fourth version of code developed by someone else and posted on the Propeller forum. Remember that I am not a programmer. Without others posting code, this project would have been abandoned a long time ago. Also note that there are four quadrants to worry about. The robot must be tested in each quadrant after any code changes are made. It is not unusual to have two quadrants correct and two quadrants 180° off. The last time I change much code, there were three quadrants correct and one quadrant was 180° off. Just test, test, test. |
Kill Switch
A stock Traxxas transmitter was gutted and the rolling code remote installed. The original throttle control was used as the "Dead Man" kill switch. Logic for the throttle control and transmitter is provided by a simple BS2 program. |
Resources The GPS NEMA Cog uses about 50 to 75 msec every GPS update. There is time available for ten GPS updates per second and additional functions. |
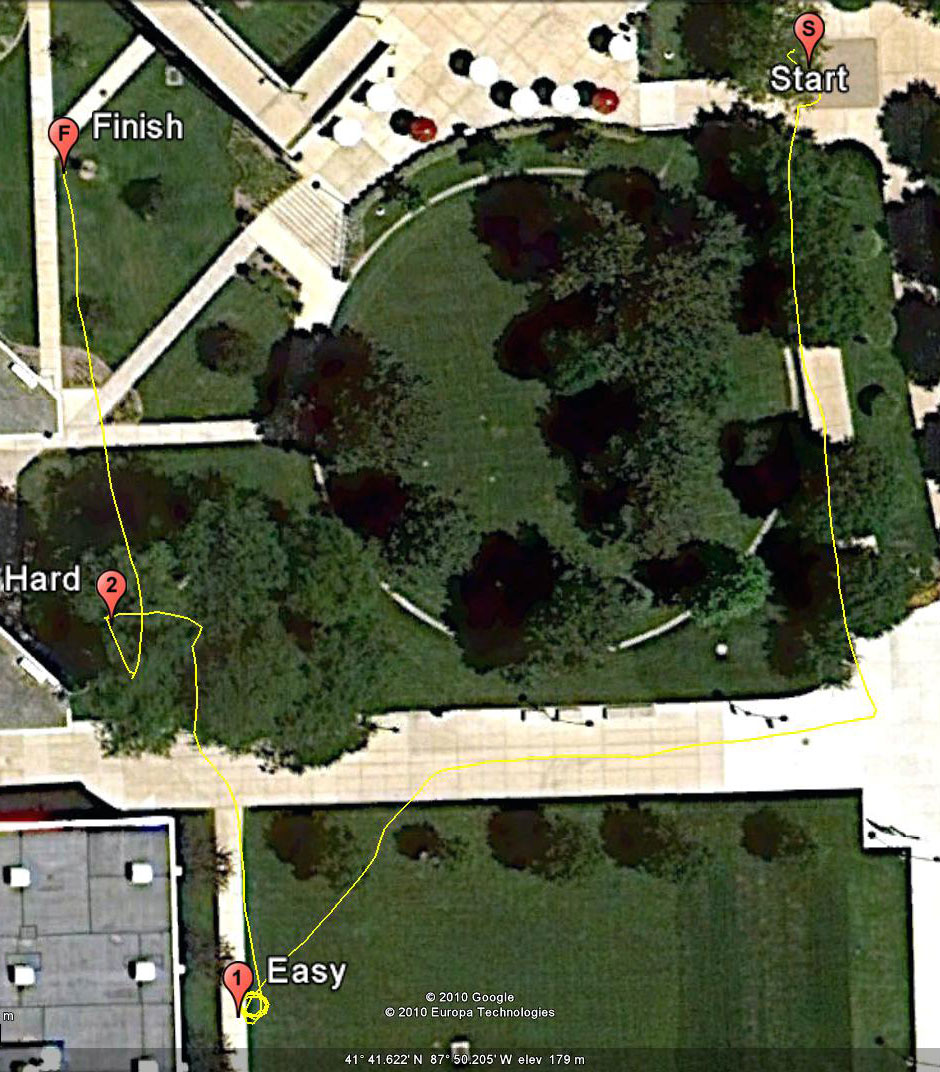
Navigation Commands Nav(927, 1551, 40) ' Start That is the total programming done at an event! |
Results ChiBots second RoboMagellan contest was held on November 8, 2008. Apparently, I had miscalculated the GPS offset location, so the robot was looking for way points in Cicero. The GPS guidance was disabled and the course was attempted using just the compass and encoder. In practice, performance was little better than horrible. For the scoring runs, the encoder stopped working and the robot drove South until it encountered the nearest construction fencing.
|








{kind=link}
{kind=link}