Expressway
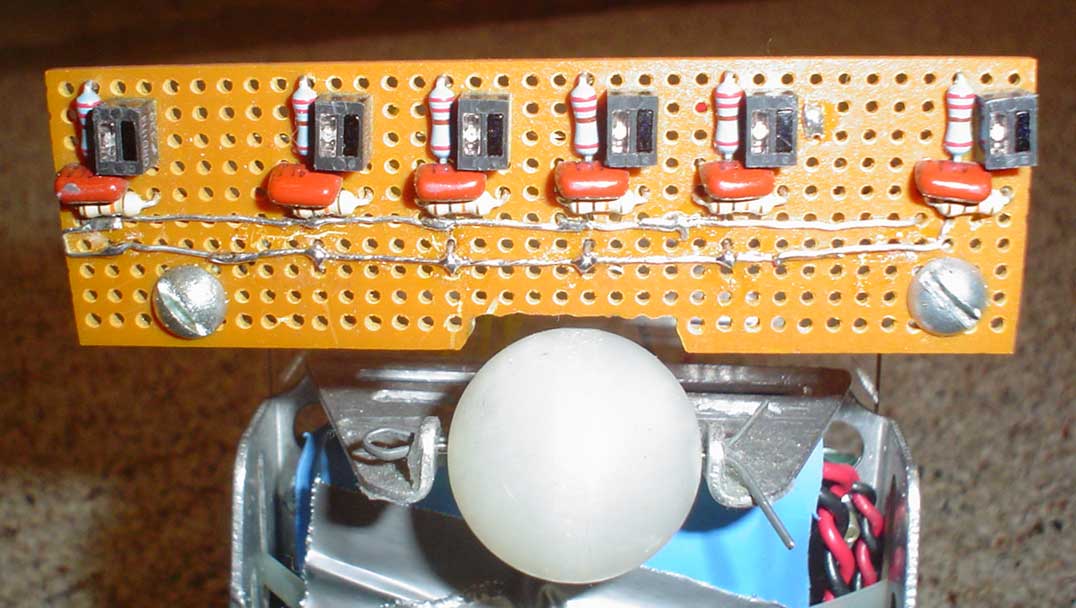
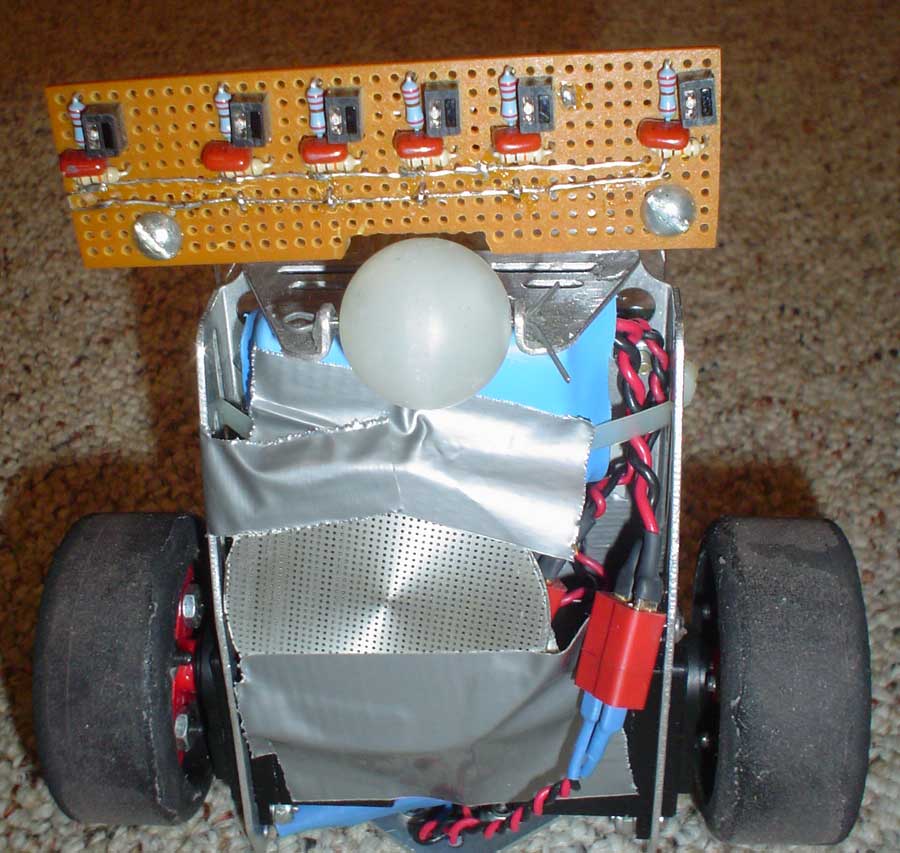
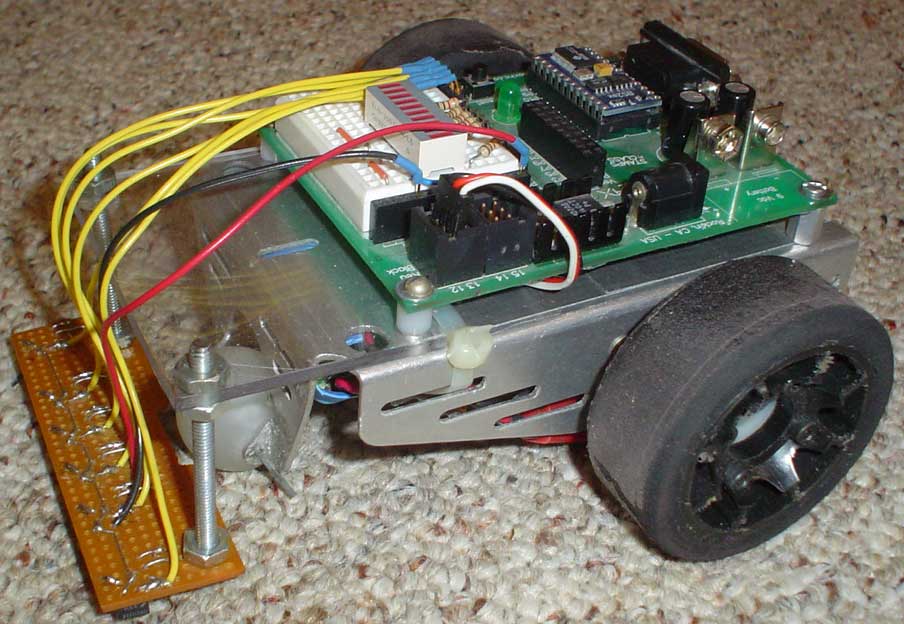 During Christmas, 2004, I was reading about the new Parallax QTI Line Sensor and the instructions for it's use. Over the years, there have been several individuals use the Fairchild QRD1114 with some success. I had purchased several to play with several years ago, but hadn't taken the time. After reading the instructions, I thought that I could do it better. The old Wall Following modified Parallax BOEBot was still intact, so it was used as the base for Expressway. The results can be seen in the videos of the 2005 NEIRG competition. During Christmas, 2004, I was reading about the new Parallax QTI Line Sensor and the instructions for it's use. Over the years, there have been several individuals use the Fairchild QRD1114 with some success. I had purchased several to play with several years ago, but hadn't taken the time. After reading the instructions, I thought that I could do it better. The old Wall Following modified Parallax BOEBot was still intact, so it was used as the base for Expressway. The results can be seen in the videos of the 2005 NEIRG competition.
The NEIRG line following contest consists of white floor tile with black electrical tape line. There can be 45 degree turns, 90 degree turns, or 135 degree turns. There is no minimum radius for any turns. The path may cross itself (at 90 degrees) and there is a two inch black square at the end. Competitors are not allowed to see the layout before their run. Each competitor gets one chance to complete the course and stop at the end. The timer runs from the time the robot initially starts until it stops at the end. If the robot needs correction, it can be picked up, but must be restarted at the beginning. Points are awarded for each tile successfully navigated and bonus points are awarded for stopping at the end. In the case of a points tie, the winner is determined by elapse time. In the first video, Expressway completed the course but failed to stop at the end. With the clock still running, Expressway was restarted (second video), completed the course, and eventually stopped at the end. That was good enough for third place in the event.
So what is there to do for the next event. Could I get a robot to complete the course in less that 10 seconds? That would be a challenge. |