Excuse
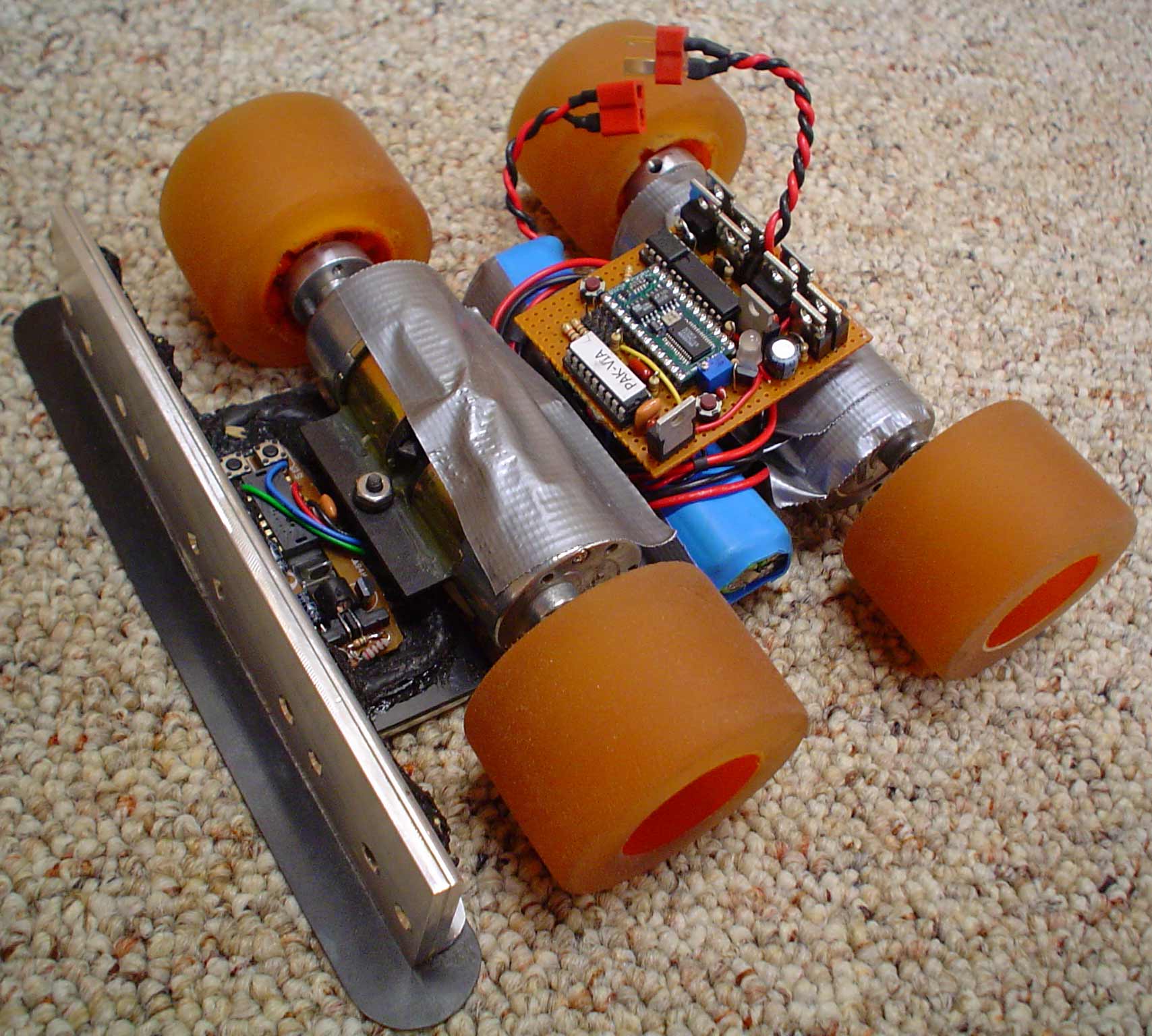
| Excuse started out as an experiment in IR mouse speed and direction feedback as well as a non-servo based, pivoting drive train in a competitive 3 pound Sumo robot. |
The technique to read data from the mouse was to A) clear the PAK VIa registers, B) wait 5 milliseconds, and C) read the PAK VIa buffers. The results were two byte sized variables for the X and Y velocity. |
 For test purposes, the mouse was read and the results were stored in EEProm for later recovery and examination. The actual results were repeatable, reliable velocity readings up to 12 inches per second (the maximum speed of the mouse). Unfortunately, no useful information could be gained at normal sumo speeds of 20 to 30 inches per second. Since this robot was blind at normal speeds, it became a poor Excuse for a real robot. This experiment will have to wait until faster optical mouse chips are available. For test purposes, the mouse was read and the results were stored in EEProm for later recovery and examination. The actual results were repeatable, reliable velocity readings up to 12 inches per second (the maximum speed of the mouse). Unfortunately, no useful information could be gained at normal sumo speeds of 20 to 30 inches per second. Since this robot was blind at normal speeds, it became a poor Excuse for a real robot. This experiment will have to wait until faster optical mouse chips are available. |
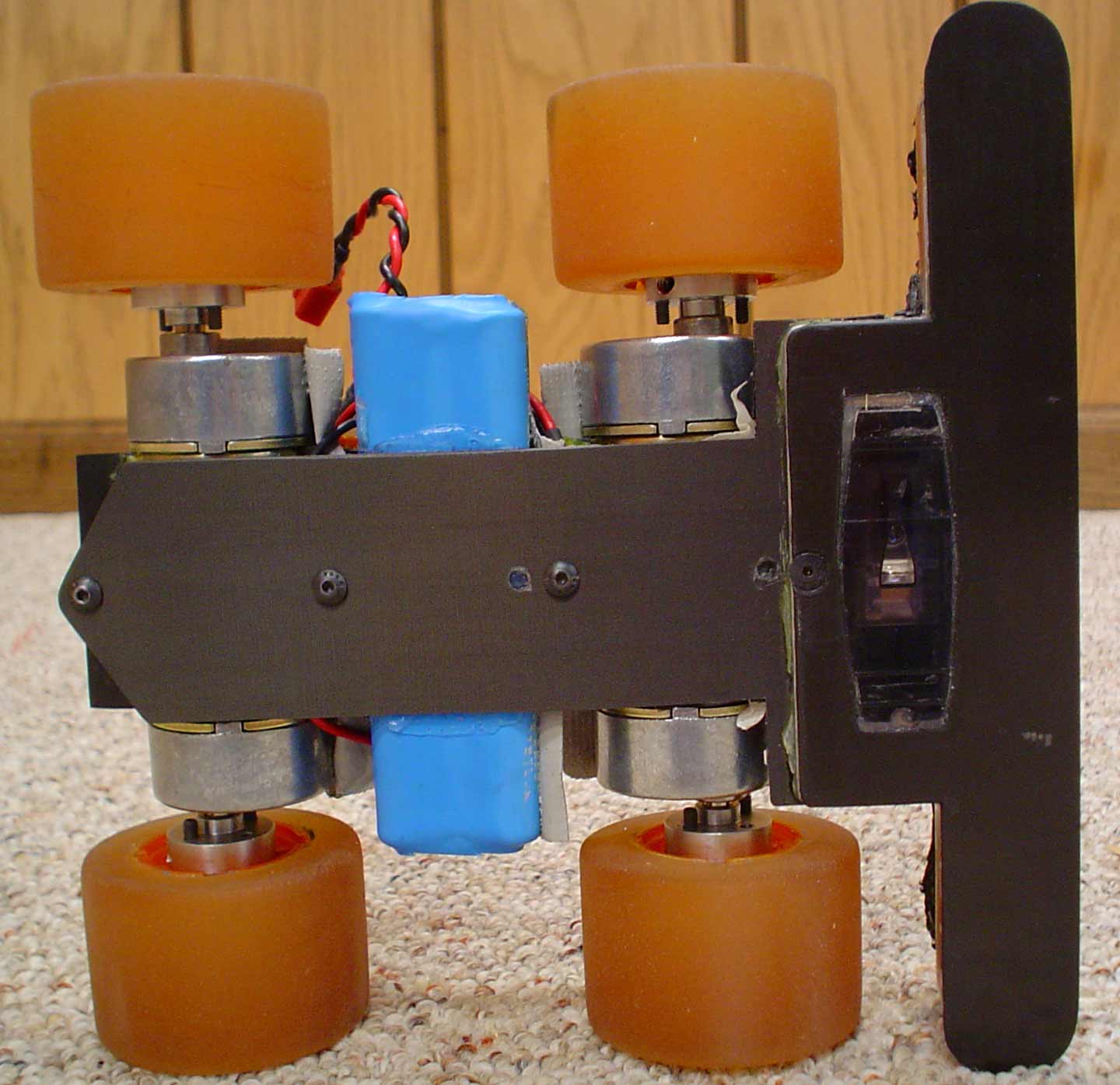
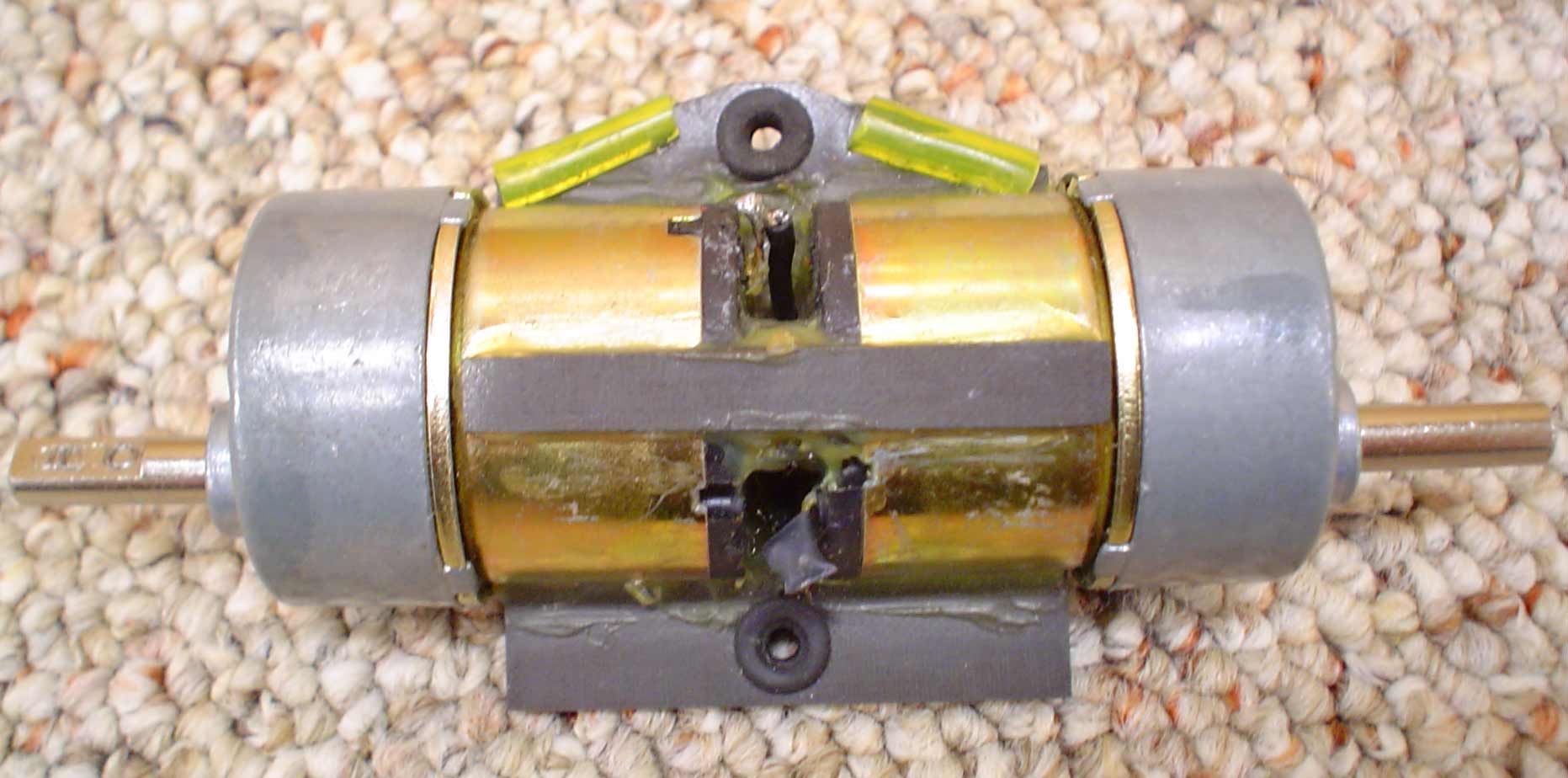 The original motors in Excuse were Lynxmotion 7.2 Volt, 30:1 gear motors. Two motors (one axle) were epoxied to an “H” shaped piece of carbon fiber laminate which held the two mounting grommets that provided the pivoting axle movement. An additional strip of carbon fiber laminate was epoxied to the top of the two motors to add strength. The original motors in Excuse were Lynxmotion 7.2 Volt, 30:1 gear motors. Two motors (one axle) were epoxied to an “H” shaped piece of carbon fiber laminate which held the two mounting grommets that provided the pivoting axle movement. An additional strip of carbon fiber laminate was epoxied to the top of the two motors to add strength. |
 The five IR sensors are mounted very low in the extruded aluminum front bumper. Each sensor covers approximately 15 degrees width, so the five sensor pairs cover about 75 degrees. Panasonic PNA4602M detectors and Fairchild QEC113 IR LEDs were used. An adjustable Voltage regulator provides power to the LEDs and is used as a sensor distance adjustment. No line sensors are used. The five IR sensors are mounted very low in the extruded aluminum front bumper. Each sensor covers approximately 15 degrees width, so the five sensor pairs cover about 75 degrees. Panasonic PNA4602M detectors and Fairchild QEC113 IR LEDs were used. An adjustable Voltage regulator provides power to the LEDs and is used as a sensor distance adjustment. No line sensors are used.
|
 For the Winter 2004 NEIRG, Excuse was entered in the 3 Kilogram sumo class to test the motors driven by 14.4 volts and the survivability of the epoxied motor mounts. It was hoped that Excuse would last a few rounds so that the tests were worthwhile. Twelve AA Nickel Metal Hydride batteries were installed to assure that Excuse was too heavy for the 3 pound sumo class. The result was a 3 pound 4.2 ounce Excuse that could push between 10 pounds 14 ounces to 11 pounds 0 ounces and had a top speed of 36.4 inches per second. For the Winter 2004 NEIRG, Excuse was entered in the 3 Kilogram sumo class to test the motors driven by 14.4 volts and the survivability of the epoxied motor mounts. It was hoped that Excuse would last a few rounds so that the tests were worthwhile. Twelve AA Nickel Metal Hydride batteries were installed to assure that Excuse was too heavy for the 3 pound sumo class. The result was a 3 pound 4.2 ounce Excuse that could push between 10 pounds 14 ounces to 11 pounds 0 ounces and had a top speed of 36.4 inches per second. |
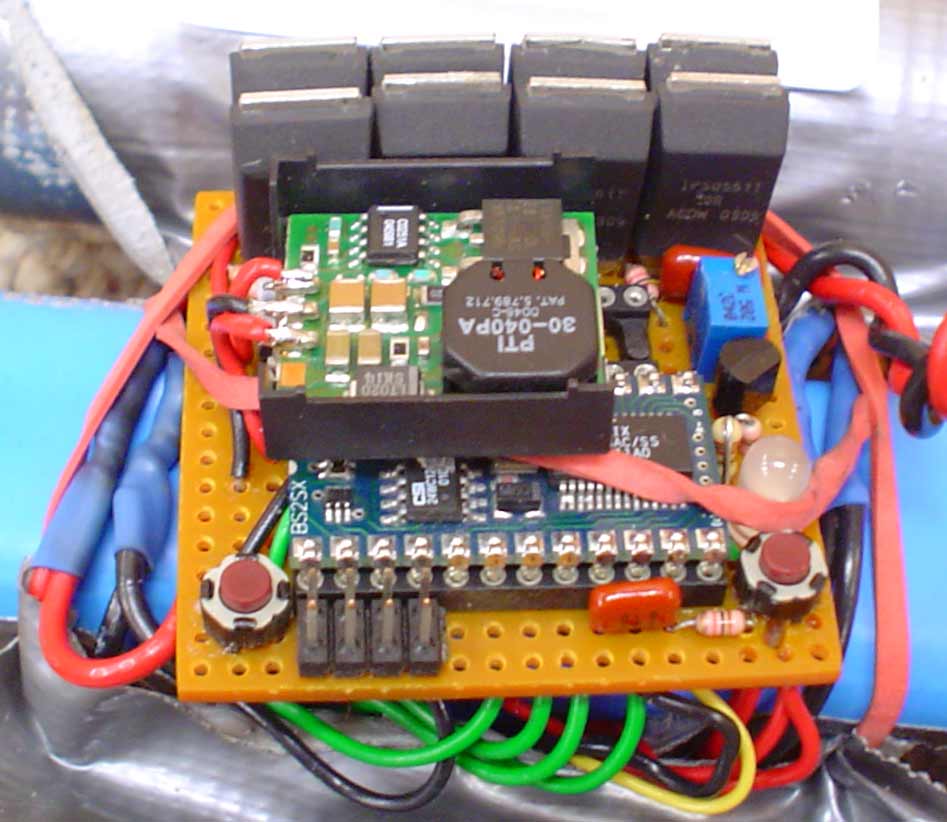
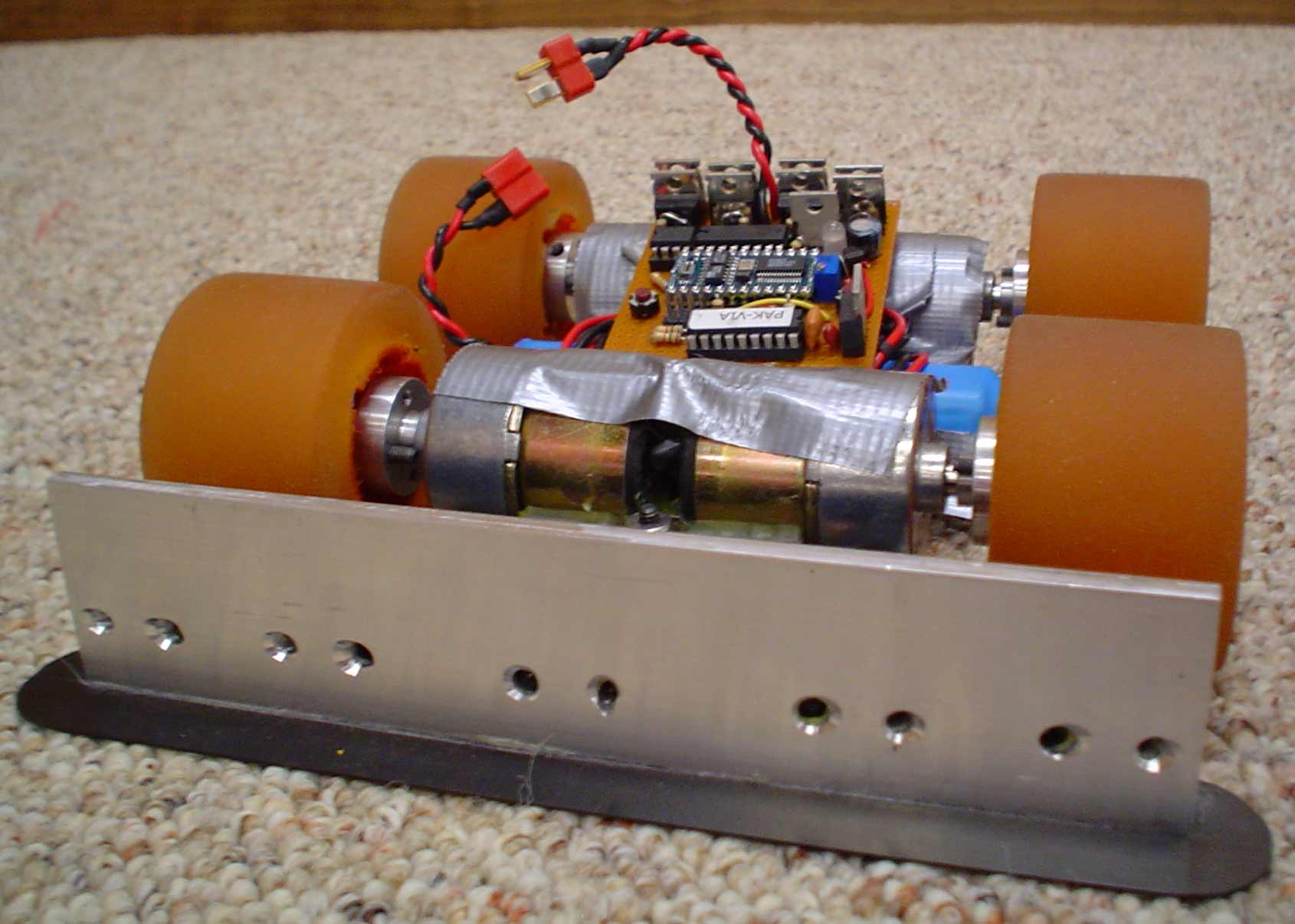
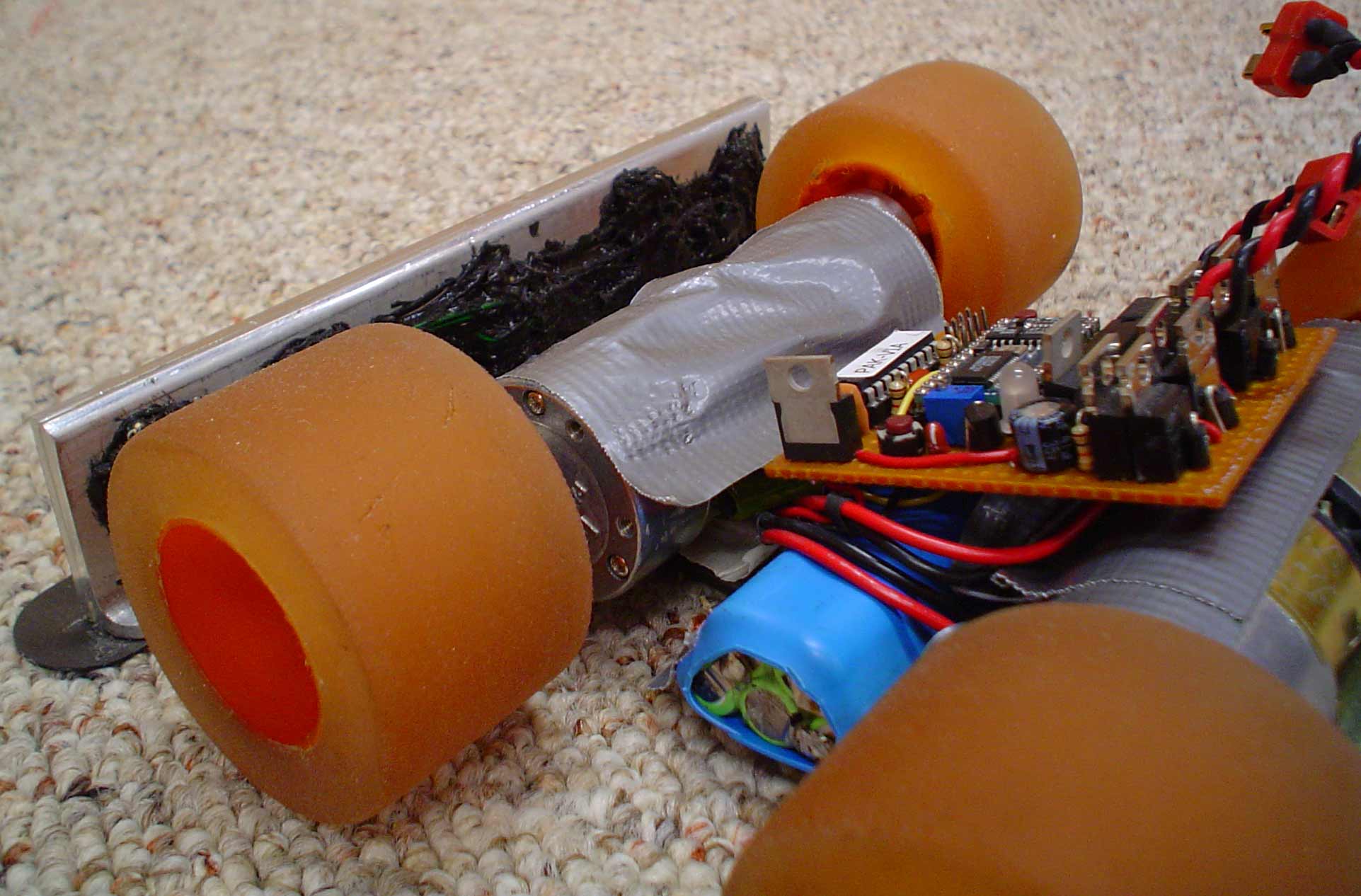
 A week before the Winter Games, Excuse developed an intermittent reset problem. While looking for the problem, the control was shorted to full battery voltage that destroyed all of the electronics. A new, experimental control was fitted using IPS0551 and IPS5551 MOSFETs which provided drivers included within the FETs. These MOSFETs can be turned on and off directly from microprocessor pins. The new control was less than 1.75” square, has a drive current capacity of 16 to 18 amperes per side, and can be run with up to 40 volt batteries. The large device in the photo is a switching voltage regulator which is required due to heat generation from standard voltage regulators at the higher voltage drop. The switching voltage regulator partially covers the BS2SX and completely covers the Pololu PIC and the PAK VIa. A week before the Winter Games, Excuse developed an intermittent reset problem. While looking for the problem, the control was shorted to full battery voltage that destroyed all of the electronics. A new, experimental control was fitted using IPS0551 and IPS5551 MOSFETs which provided drivers included within the FETs. These MOSFETs can be turned on and off directly from microprocessor pins. The new control was less than 1.75” square, has a drive current capacity of 16 to 18 amperes per side, and can be run with up to 40 volt batteries. The large device in the photo is a switching voltage regulator which is required due to heat generation from standard voltage regulators at the higher voltage drop. The switching voltage regulator partially covers the BS2SX and completely covers the Pololu PIC and the PAK VIa. |
| The new control did not brake the motors during the off cycles so the speed control was not as accurate as the previous controls. Without sufficient time to reprogram the various escape routines, Excuse competed with only simple maneuvers. With some exceptional luck, Excuse won the competition. There were several matches where Excuse and the other robot would push each other back and forth across the ring several times. The spectators were well entertained. |